Ideas in Action
Research Projects
MS Research
MDO · Astrodynamics
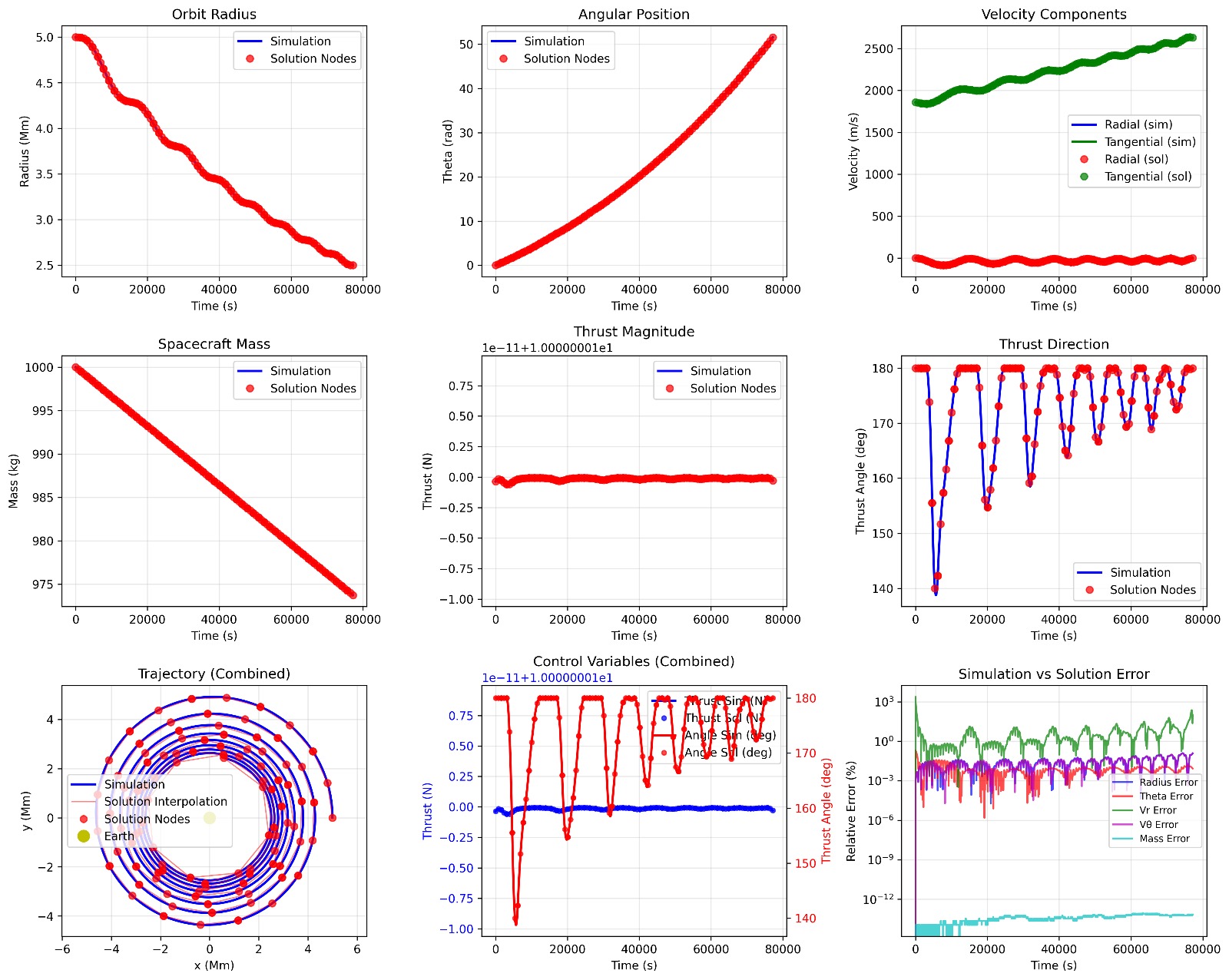
Coupled Spacecraft Trajectory–Power Subsystem Design Optimization
Developed an MDO framework coupling trajectory dynamics and power subsystem design for a low-thrust orbit-lowering maneuver around asteroid 16-Psyche.
Stochastic Control · Optimization
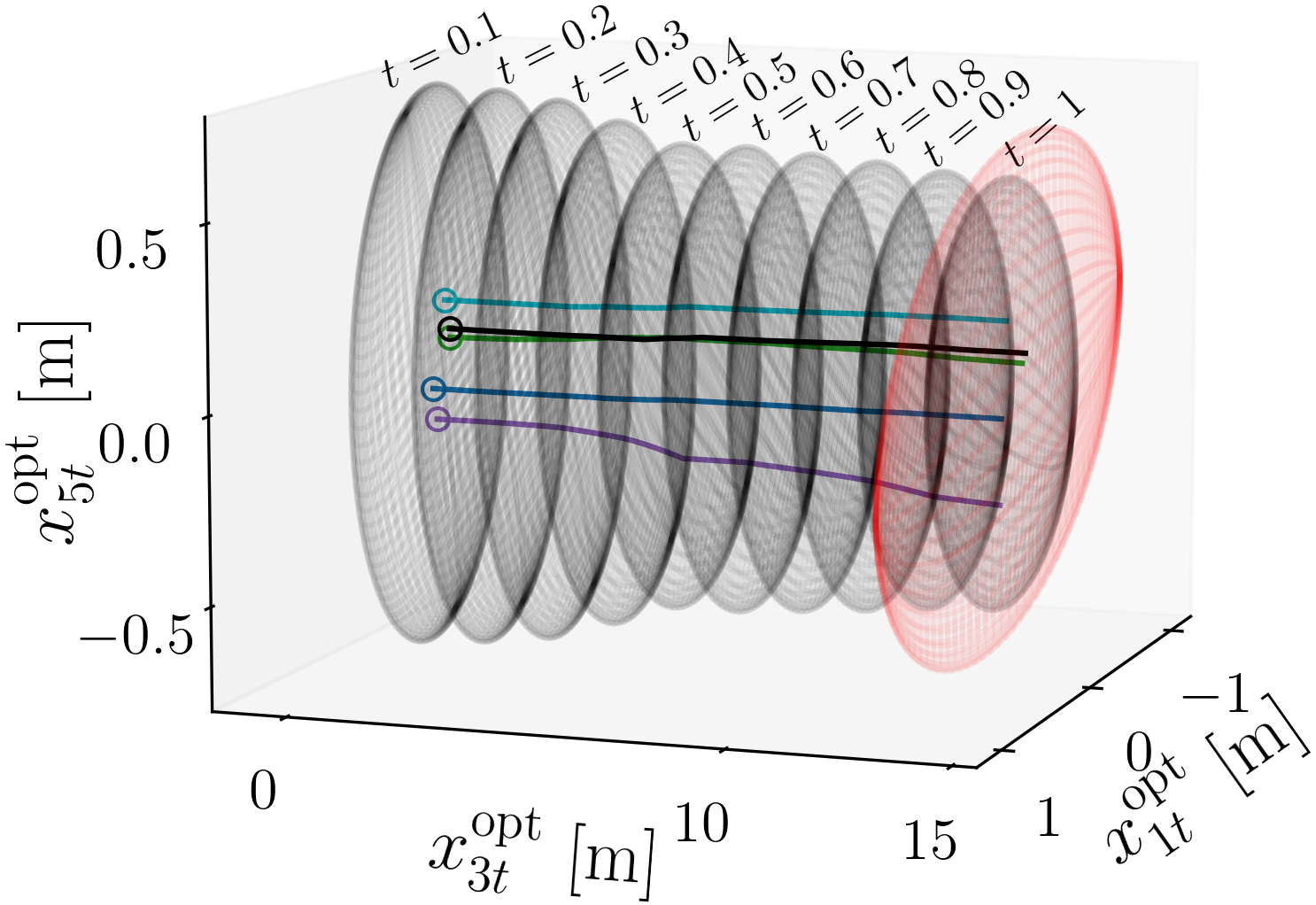
Optimal Covariance Control
Developed a computationally efficient novel covariance steering algorithm in continuous time with applications to control of aerospace and robotic systems under stochastic disturbances.
Astrodynamics · Optimal Control
Cislunar Low-Thrust Trajectory Optimization
Extended the classical Pierson–Kluever three-stage method for optimal low-thrust cislunar transfers by allowing variable thrust magnitude under CR3BP dynamics.
UG Research
Astrodynamics · Optimal Control
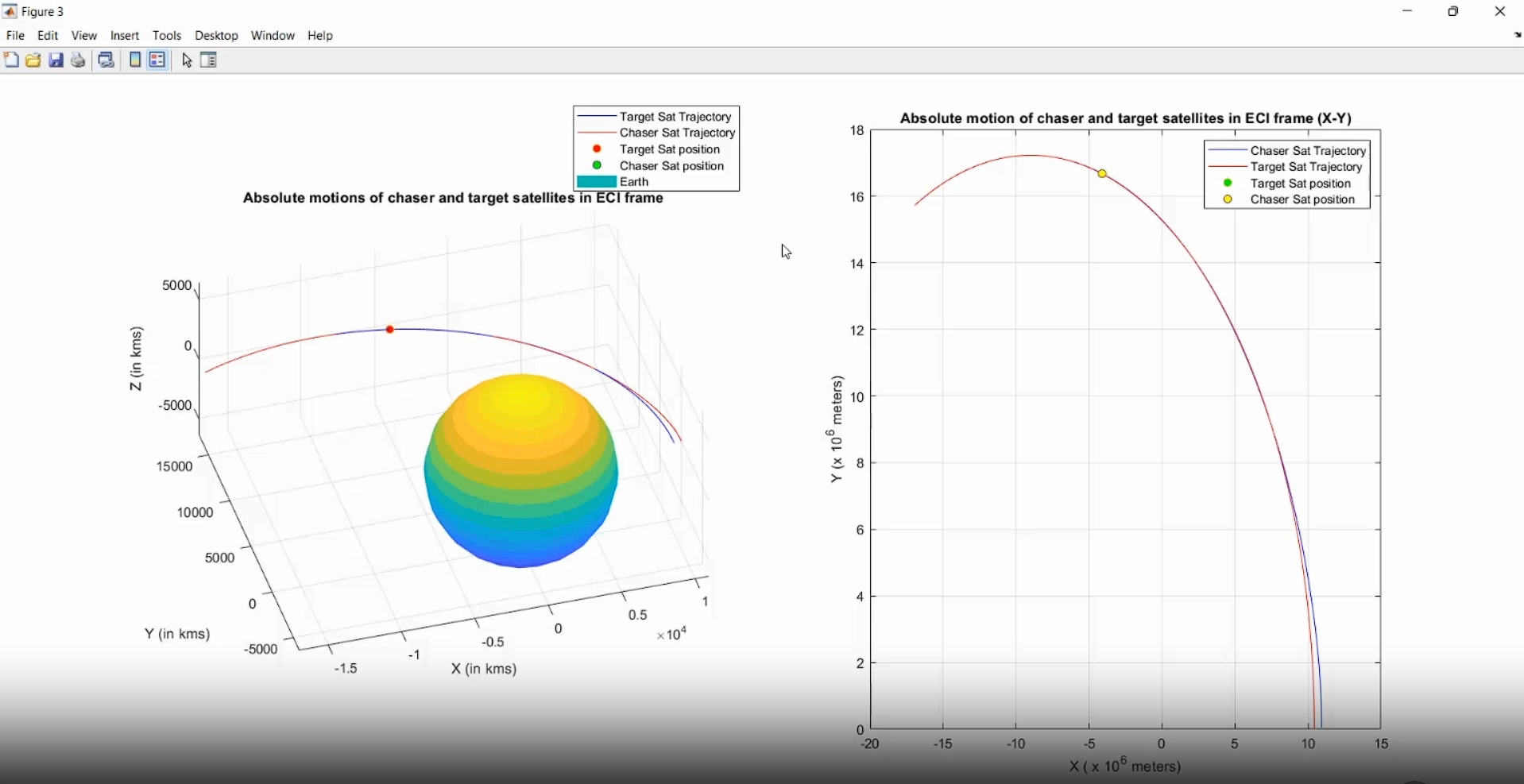
In-Orbit Autonomous Servicing
Developed a guidance and control framework for an autonomous spacecraft capable of performing in-orbit servicing on noncooperative tumbling satellites.

Robotics · Control Systems
Autonomous Mars Rover
Co-founded CRISS Robotics, a student research technical team consisting of 60+ members for designing and manufacturing an all-terrain 6-wheeled Mars Rover.

Control Systems · UAV
Control of Agile Fixed-Wing UAV
Backstepping-based longitudinal and lateral-directional stability controllers with a wind observer for robustness against atmospheric disturbances.
Motor Control · CAD
Powertrain of a Formula-Style Electric Vehicle
Designed a high-fidelity Simulink powertrain model for motor selection, battery sizing, and motor control optimization.
Robotics · Control Systems · DL
Vitran Drone: Autonomous Delivery Quadcopter
Designed a flight controller and autonomous navigation framework for a delivery quadcopter operating in city environments.